Hardware overview
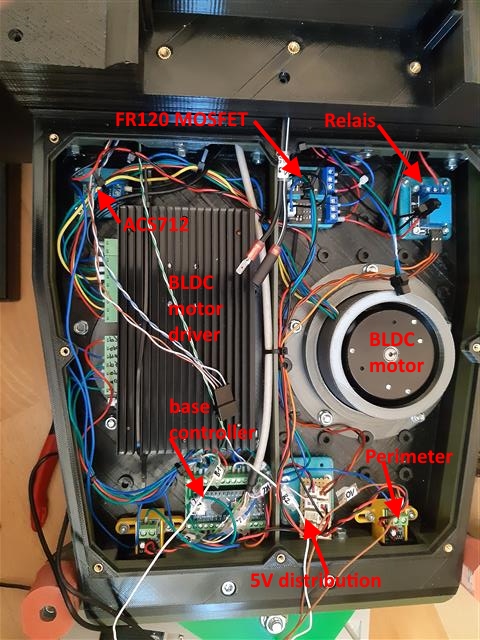
ROSMower chassis has been equipped with other hardware I don’t want to describe in detail. So here is an overview of additional hardware used. All parts are attached to base controller.
- BLDC driver mow motor JKBLD300 JKONG Motors
- brushless motor JK57BLS02 as mow motor
- FR120 MOSFET switches to control LED headlights
- Relais board to toggle Hoverboard PCB on/off
- ACS712 current sensor board to measure current of mow motor